 Passions
Créations
Magie ...
Passions
Créations
Magie ...
AUTOMATE Chien Snoopy
Dans cette description, je vais détailler la réalisation, d'un automate en partant d'une peluche du commerce.
Je vais procéder étape par étape, écrire au fur et à mesure l'avancement de la fabrication.
CHOIX DE LA PELUCHE
Parcourir les "vide greniers" ou aller chez "Emmaus" où j'ai trouvé cette peluche pour 2 Euros.
Hauteur 40 cm ce qui est confortable pour placer la mécanique.


Premier constat : La position du chien est un peu trop en avant et ne le met pas en valeur.
Il va falloir donc le redresser ce qui sera plus facile pour incorporer les mécanismes.
Il faudra donc que les pattes avant soient surélevées, on verra comment on fait par la suite.
Voici donc avec une cale sous les pattes avant, ce que cela donne.

CHOIX DES MECANISMES ET DE LEURS COMMANDES
Pour mes automates j'utilise des servo-moteurs de modèle réduit pilotés par une carte "ARDUINO"
* Commande directe des servos par la carte
* Facilité pour la programmation des mouvements.
( Je donnerai plus loin les infos sur ces matériels.)
ETAPE 1 : CHOIX DES MOUVEMENTS.
C'est une étape importante, qu'il faut faire en premier avant tout début de réalisation.
Il conditionne toutes les étapes et la chronologie de la fabrication.
Cela évite les rajouts, qui ne peuvent que nuire à la fiabilité de l'Automate.
Voici une vidéo qui explique le choix des mouvements.
Suite à cette vidéo voici les mouvements retenus.
* Tête droite gauche entrainée par un servo.
* Tête inclinée droite gauche entrainée par un servo.
* Oreille droite entrainée par un servo.
* Oreille gauche entrainée par un servo.
* Mâchoire et langue entrainée par un servo.
* Queue entrainée par un moteur.
* Mouvement langue entrainé par un moteur.
Option non mécanique supplémentaire possible :
* Aboiements du chien qui demande une carte son pilotée par la carte "ARDUINO" ainsi qu'un haut- parleur qui devrait tenir largement dans le chien.
STRUCTURE DE L'AUTOMATE
Maintenant que l'on a choisi les mouvements on dessine la structure de l'automate.
Pas de plans sophistiqués, pas de cotes, juste envisager les différentes pièces a mettre dans l'automate et où seront placés les mécanismes.
Cela donne le schéma ci dessous.

Cela va permettre également, de voir par quelle partie commencer.
On voit que le plateau où il y aura le plus de mécanismes est le plateau basculant "D".
Il est attaché à la tête et doit se positionner en hauteur au niveau de la mâchoire.
Nous commencerons donc par la tête du chien sur le plateau basculant.
ETAPE 2 : Plateau Basculant et ses mécanismes
1.2 Séparation de la tête et du corps du chien.
Découdre la tête au niveau du cou


Comme il faudra rattacher la tête au corps à la fin, on va coudre un "Velcro" niveau du cou, sur la tête et le haut du corps.
On mettra le "Velcro" le plus souple (Grippe le plus fin vers l'extérieur ) en dépassement au niveau de la tête.

On met de coté le corps, nous allons travailler sur la tête du chien.
On va prendre un carton fort pour déterminer la dimension du plateau basculant qui constituera la base de la tête.
Cela permet d'ajuster l'ensemble et de déterminer également la pièce qui va rentrer dans la mâchoire.
On fera les pièces définitives dans un matériau solide en se servant du contour des cartons forts.
On obtient donc cet ensemble plateau basculant et piece pour le mouvement de l'ouverture de la gueule du chien.

On peut tester ainsi la démontabilité et les volumes disponibles.
On va pouvoir également voir comment mettre le servo de la mâchoire et comment on va pouvoir faire sortir la langue.
Pour cela on va découdre la langue ce qui va créer le passage pour quelle puisse coulisser.
Voici le résultat après les essais de la maquette carton.


On voit que le plateau basculant a changé de forme les 2 bras sur l'avant venant s'insérer au niveau de la mâchoire supérieure, ce qui donne plus de rigidité à la tête et facilite le mouvement de la mâchoire inférieure.
Le plateau basculant est coupé dans un morceau de circuit électronique, mais on peut utiliser du contre-plaqué de 3 à 5 mm.
La mâchoire inférieure est en aluminium de 2 mm d'épaisseur afin de s'intégrer dans la peluche.
Elle est recourbée en bout pour forcer la forme dans la peluche.
Sur cette plaque mâchoire est vissée une bride ( Réalisée avec un coton tige ) qui permettra de guider la langue dans son glissement.
Le servo moteur est fixé à l'aide d'une patte découpée dans un boîte de gateaux et fixée par 2 vis /écrou.
La came sur le servo permet d'incliner la mâchoire.
La longue vis fixée sur la came sera le pivot pour la langue.
Un ressort a été ajouté pour la fermeture de la mâchoire.


Les servos sont acheté sur le site Banggood au prix de 11 Euros les 6 servos.
Ils ont des pignons en métal et la sortie mécanique est sur roulements.

MECANISME DE LA LANGUE
Pour rigidifier la langue, on insère dans celle-ci une bande de plastique semi souple ( Type boîte à gateau des grandes surfaces ).
La langue étant cousue dans sont milieu, il a fallut faire une fente afin de passer autour de la couture.
La bande de plastique est agrafée avec la langue.
Cette bande est repliée sur elle même en entourant un tube diamètre intérieur 3 mm qui va servir de pivot pour l'axe fixé sur la came.


Une longue vis de Diamètre 3mm est fixée sur la came.
Langue et son tube sont enfilés sur cette vis un écrou empêchant l'ensemble de sortir.
Voici le résultat une fois monté en :
Position langue rentrée (Mâchoire fermée )
Position intermédiaire ( Mâchoire semi ouverte )
Position sortie ( Mâchoire grande ouverte )

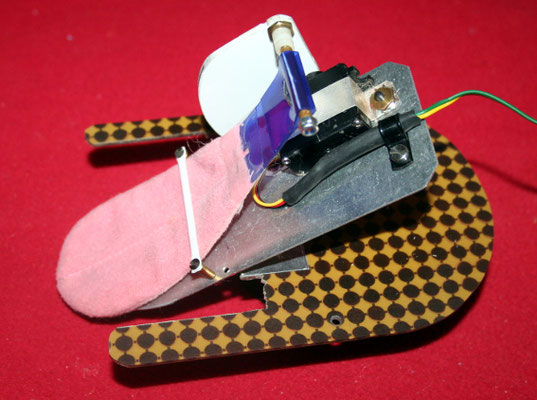


Voici le résultat avec le mécanisme dans la tête de Snoopy


La bouche pilotée avec un programme de test pour vérifier le bon fonctionnement et un essai pour faire "haleter" Snoopy uniquement avec un seul servo.
MECANISME OREILLES
Pour tenir les servos des oreilles on va faire "Une pierre deux coups"
On fait une bride qui relie les 2 côtés de la tête.
Cette bride permet de :
* fixer les 2 servos des oreilles.
* Fixer le servo d'inclinaison de la tête.
* Maintenir la peluche sur le haut de la tête et servir de support pour l'autre bride de l'arrière de la tête.
De ce fait le tissus ne pourra pas venir perturber les mécanismes.


Pour faire bouger les oreilles on va simplement, les faire avancer sur le devant en poussant le tissus à l'aide des servos.
Pour éviter l'usure et les efforts mécaniques, l'extrémité du palonnier de servo est équipé d'une roulette ( Roulement de récupération ) et le tissus est protégé par du "Scotch" armé.
Si je n'avais pas eu de roulement, j'aurais utilisé un perle ronde.

MECANISMES INCLINAISON / ROTATION
Les deux mouvements ne peuvent dissociés.
On monte 2 équerres dans l'axe de la tête sur la "Platine langue".

On réalise le plateau rotatif avec son servo.
Le poids de la tête étant non négligeable, on ne peut faire supporter à l'axe du servo de rotation tous les efforts exercés sur celui-ci.
On équipe donc le "Plateau rotatif" de 4 roulettes qui feront la liaison mécanique et supporterons les contraintes mécaniques.
Le servo utilisé est un servo type "Standard" qui est plus puissant. ( 5kg / Cm)
Ce plateau est équipé de 2 équerres servant de pivot et faisant la liaison avec la "Platine langue".
La liaison pour incliner la "Platine langue" par rapport au "Plateau rotatif" se fait par un axe équipé de rotules.


On assemble La "Platine langue" et la "Platine rotation" par un axe vissé.


Voici en vidéo ce que cela donne en mouvement mécanique seule et avec la pelûche.
Sur cette vidéo, les mouvements sont montrés les uns après les autres, avec leurs amplitudes maximum et à une vitesse constante.
Par la suite, les mouvements seront programmés en simultanés, à vitesse variable, avec accélération et freinage des mouvements.
Nous allons construire maintenant la structure pour tenir la tête de Snoopy dans le corps.
Tout d'abord, il faut découdre la queue et retirer la bourre à l'intérieur du corps, sauf dans le pattes.

Pour la structure, on réalise une embase qui va se loger dans les pattes arrières de Snoopy. Il faut la faire la plus large possible c'est elle, qui donnera sa stabilité à l'automate.
Pour soutenir la structure, j'utilise des tiges filetées de diamètre 6mm, cela assure une bonne rigidité et les tiges avec les écrous permettent de régler la hauteur des platines.
Le coût est dérisoire (0.60 Euros le mètre )

Ayant réalisé cette structure de base , je me suis aperçu que l'on pouvait faire un autre mouvement complémentaire qui permettra à Snoopy de donner la patte. Cela demande un servo- moteur supplémentaire mais donnera un aspect encore plus convivial au chien.
On incorpore donc une platine supplémentaire qui s'intègre facilement, grâce à nos tiges filetées.

Le mouvement mécanique pour la patte est simple.
On retire la bourre dans la patte en en laissant seulement dans l'extrémité. La patte devient donc flexible; et va se plier quant le bras du servo va monter. Le poids de la patte est suffisant pour quelle descende par gravité.
On va au mécanisme de la queue.
Ce mécanisme, pour des facilités de construction, sera réalisé sur une platine qui se fixera sur l'embase de la structure. C'est beaucoup plus facile à construire et permet d'ajuster les réglages facilement.
Pour plus de réalisme de la queue on va faire les mouvements suivants.
- Montée et descente de la queue dans n'importe quelle position.
- Mouvements de battement de la queue dans n'importe quelle position.
Pour la montée / descente on va utiliser un servo et pour les battements de la queue un moteur.
La vitesse de rotation de ce moteur pouvant être programmée par la commande moteur.

On voit sur la photo, le servo en rouge, qui actionne le bras porte moteur.
Ce moteur est en liaison mécanique, par 2 rotules, avec l'axe de la queue. on a donc le monté /descendre de la queue et la rotation du moteur commandant les battements.


A remarquer sur le palonnier du servo, le pivot est réalisé avec un domono d'électricien, ce qui permet d'ajuster facilement les réglages.
ASSEMBLAGE
Tous les mécanismes sont maintenant terminés, on obtient donc ceci :



On va donc relier électriquement ces platines à la carte "Arduino" programmable et s'attaquer au programme afin de faire tout bouger simultanément.
Le programme est terminé, il a été versé dans la carte ARDUINO, tous les mouvements sont aléatoires sauf la séquence ou il fait le beau.
Dans la vidéo ci dessous il a été intégré à l'orgue de barbarie et tient bien sa place ...